Addverb의 최첨단 모바일 로봇 기술은 피킹, 분류, 자재 이동과 같은 특정 워크플로우를 간소화하거나 원활한 자동화를 통해 전체 프로세스를 혁신하는 등 미래의 요구 사항을 충족할 수 있도록 운영을 강화합니다.
멀티 카톤 피킹 로봇
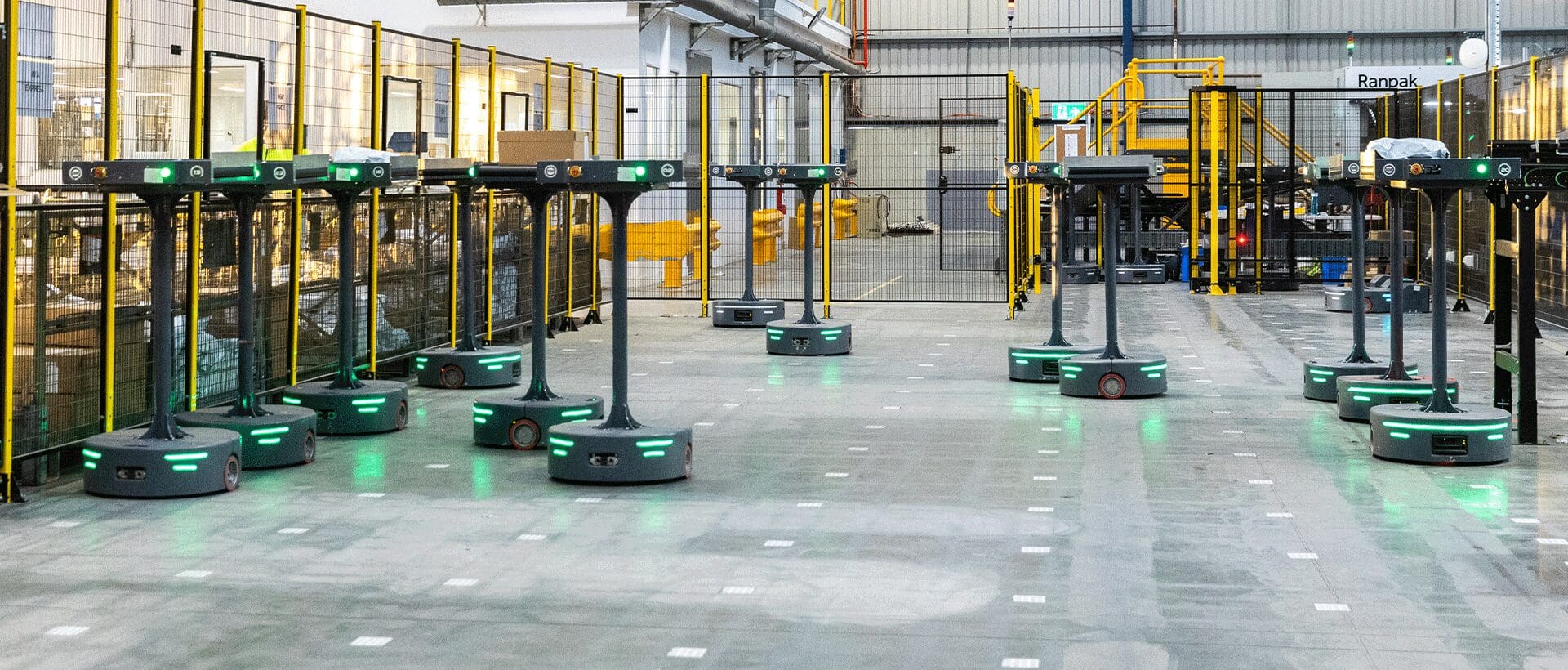
자율 이동 로봇
분류 로봇
레일 가이드 차량
수직 분류 로봇

혁신적인 레일 가이드 차량인 Travect 창고와 공장의 팔레트 운송을 혁신합니다. 고정식 트윈 레일 루프에서 빠르고 유연하며 안정적인 이동을 경험해 보세요. 확장 가능한 기능과 여러 출발지/목적지를 갖춘 Travect 많은 물량과 처리량을 효율적으로 처리합니다.

다목적 모바일 로봇인 Dynamo 자재 이동, 피킹, 분류와 같은 물류창고 애플리케이션에서 탁월한 성능을 발휘합니다. EN1525 및 ANSI/TTSDF B56.5 표준을 준수하는 Dynamo 견고한 섀시와 컴팩트한 디자인으로 신뢰성을 보장합니다. 복잡한 지형을 탐색하고 물체를 인식하며 장애물을 감지하고 고급 AI 기술을 사용하여 효율적인 주문 이행을 지원합니다.
Zippy고속 분류 로봇은 SKU를 고속으로 효율적으로 분류합니다. 장애물 감지 및 그리드 기반 그라운드 마커를 사용하여 작업을 최적화합니다. 로봇과 분류 대상을 유연하게 추가 및 제거할 수 있습니다. 수직 분류를 위한 테이블탑과 컨베이어 및 케이스 팔레트와의 통합을 위한 플로어탑의 두 가지 형태로 제공됩니다.

유연한 멀티 카톤 피킹 로봇인 Veloce 다양한 크기의 상자, 상자, 토트백의 높은 보관 요구 사항을 해결합니다. 이 적응형 솔루션은 공간을 최적화하고 대인 작업의 효율성을 향상시킵니다. 그리드 기반 내비게이션을 사용하는 Veloce 좁은 통로를 손쉽게 탐색하여 상자, 상자, 토트백을 매우 정확하게 두 배 깊이 보관하고 검색할 수 있습니다.

SortIE 모듈식 수직 분류 로봇으로 전용 트랙에서 작동하여 패킷을 적재함의 각 빈 위치로 신속하게 분류합니다. 혁신적인 디자인, 효율적인 벨트 구동 메커니즘, 정밀한 모션 제어를 통해 완벽한 분류를 보장합니다. 신속한 상거래 및 역물류에 이상적인 SortIE 수요 증가에 따라 쉽게 확장할 수 있습니다.
왜 Addverb?
AMR이 운반할 수 있는 최대 페이로드!
고속 기능으로 시간당
재고 분류 정확도
신뢰 대상